
Ülevaade
CNC-tööpink on mehaaniliste, elektriliste, hüdrauliliste, pneumaatiliste, mikroelektroonika ning info- ja muude tehnoloogiate integreeritud rakendamine ühe elektromehhaanilise integratsioonitootena mehaanilistes tootmisseadmetes, millel on paindlik, universaalne, ülitäpne ja kõrge. tõhusus "paindlik" automaatne tootmisseade, see töötleb erinevaid vajalikke toiminguid ja etappe ning tooriku kuju ja suurust digitaalse koodiga, juhtmeediumi kaudu arvjuhtimisseadmesse, arvjuhtimisseadme kaudu sisendteabesse töötlemine ja arvutamine, käsujuhtimise tööpinkide süsteem ja ajami komponendid, vajaliku tooriku automaatne töötlemine. CNC-tööpinkide tehniline tase ja selle osakaal metallilõikepinkide toodangus ja koguomandis on üks olulisi näitajaid, millega saab mõõta riigi rahvamajanduse arengu ja tööstusliku tootmise üldist taset. Viimastel aastatel on CNC-tööpinkide osakaal Hiina ettevõtetes aasta-aastalt kasvanud ning seda on rohkem kasutatud suurtes ja keskmise suurusega ettevõtetes, samuti kasutatakse seda üldiselt väikestes ja keskmise suurusega ettevõtetes ning isegi üksikettevõtted.
CNClathe protsessi nõuded
- Kui töödeldavat detaili töödeldakse CNC-treipingiga, on etteandekogus suur, töötlemiskiirus väike ja töötlemisprotsessil on tooriku ebaühtlase pinna tõttu löögikoormus.
- Treiviimistluses etteandekogus on väike, töötlemise efektiivsuse tagamiseks on töötlemiskiirus suur.
- Spindli mootoril peab olema väike kiirus ja suur pöördemoment ning see on stabiilne ja võib töötada suurel kiirusel.
- Analoogsignaalide vastuvõtmine nõuab suurt lineaarsust ja madalat koormushäireid.
- Mootori müra on väike ja häired süsteemi automaatikaseadmetes on väikesed. Kiirustage nii vähe kui võimalik.
CNClathe KD600 seeria toodete eelised
Kd600-seeria suure jõudlusega vektorinverter võtab kasutusele täiustatud voo juhtimise tehnoloogia, mootori pöördemoment madalal kiirusel on suur, kiiruse täpsus on kõrge, hind on mõistlik, funktsioon on täielik, hetkelise voolukatkestuse töötlemise ja kiiruse jälgimise ning uuesti käivitamise funktsiooniga , tagamaks, et süsteem saavutaks pideva töömehhanismi, et mootor töötaks kõrgeima efektiivsusega olekus, seetõttu on KD600-seeria suure jõudlusega vektorinverteri kasutamine spindli vahelduvvoolu servosüsteemi asemel parim valik tööpinkide tööstusele. KD600 seeria inverteril on järgmised omadused:
- Ainulaadne nõrk magnetjuhtimistehnoloogia: saab hästi juhtida madala sagedusega suure pöördemomendiga mootorit, võib töötada 0–600 Hz.
- Kiire ja stabiilne seiskamiskiirus: magnetvoo aeglustamise peatamistehnoloogia võib mootorit aeglustada ja lühema ajaga seiskuda.
- Kiiruse täpsus ja stabiilsus: kiiruse seadmise lineaarsus on hea, kiiruse stabiilsuse täpsus on kõrge ja kiiruse kõikumine on koormuse muutumisel vahemikus 5/1000.
- Suurepärane madalsageduslik jõudlus: optimeeritud PG-vaba vektorjuhtimisalgoritm, madalsagedus 1 Hz kuni 150% nimipöördemomendini, et tagada tooriku töötlemisel tugev lõikejõud.
- Pakkuge mitut sagedussisendi režiimi: 2 pingeallikat 0–10 V või -10 V kuni +10 V sisend, 1 vooluallikas 4–20 mA või 0–20 mA sisend.
- Lai valik võrgupinge rakendusi: täiustatud lülitustoiteallika disaini saab rakendada mitmesugustes võrgukeskkondades.
- Peen tootmisprotsess: kasutage ainulaadset katte paksendamisprotsessi, õhukanal on sisemisest PCB-st täielikult isoleeritud ja sellel on tugev kohanemisvõime karmi füüsilise keskkonnaga, nagu metallitolm, söövitav gaas ja niiskus.
- Sisseehitatud lekke neeldumisahel vähendab oluliselt inimkehale saadavat elektrilööki, kui seadme korpus on laetud.
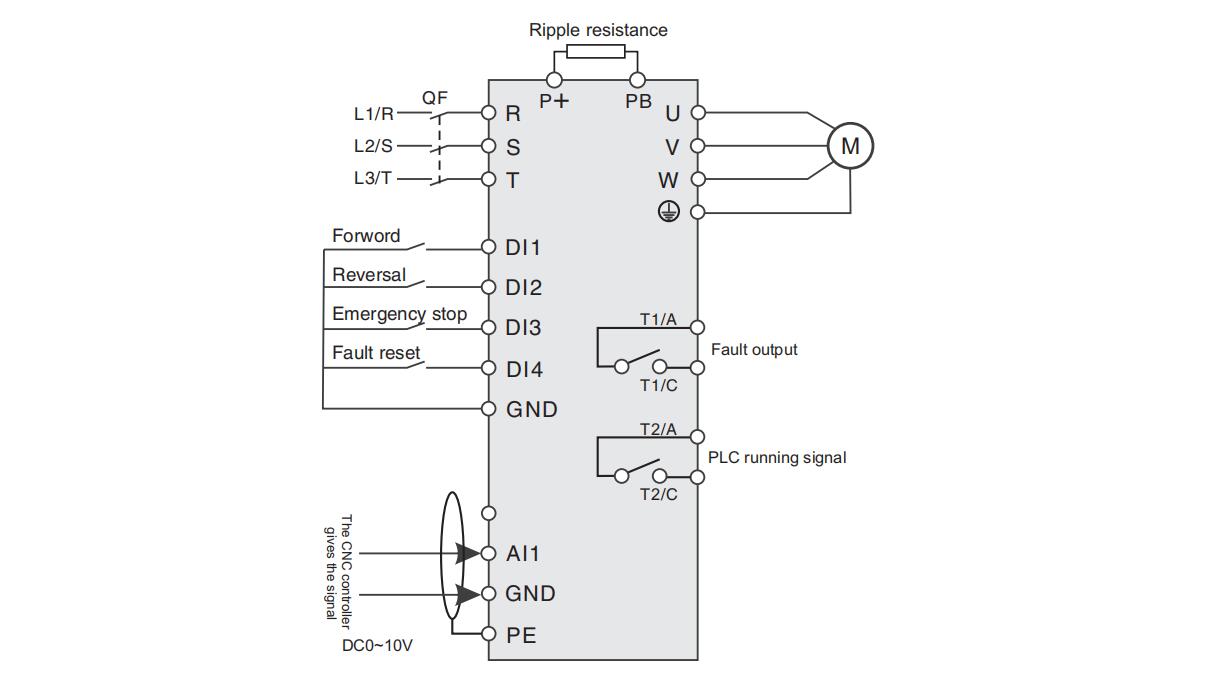
Põhiline juhtmestiku skeem
Parameeter Seaded ja kirjeldus
| Parameetri seadistus | Juhised | Parameetri seadistus | Juhised |
| P0-03=1 | PG vektorrežiim puudub | P4-01=11KW | Mootori nimivõimsus |
| P0-04=1 | Väline terminal käivitub või peatub | P4-02=380V | Mootori nimipinge |
| P0-06=2 | Antakse analoogsuurus AI1 | P4-04=22,6A | Mootori nimivool |
| P0-14=150 | Maksimaalne väljundsagedus | P4-05 = 50 Hz | Mootori nimisagedus |
| P0-16=150 | Töösageduse ülemine piir | P1-06 = 1435 RPM | Mootori nimikiirus |
| P0-23 = 1,0 | Kiirendusaeg | P6-00=2 | Vea väljund |
| P0-24=0,8 | Aeglustusaeg | P6-02=1 | Sagedusmuundur töökorras |
| P5-00=1 | Edasijooks | P5-01=2 | Pööratud jooks |
| P4-01~P4-06 mootori parameetrid sisestage täpselt | |||
Silumise tulemus
On tõestatud, et KD600 seeria suure jõudlusega vektorsagedusmuundur vastab täielikult tööpinkide spindli juhtimise nõuetele. KD600 võtab kasutusele juhtiva PG-vaba vektorjuhtimisrežiimi, mis suudab sujuvalt väljastada 150% pöördemomenti isegi madala kiirusega (madala sagedusega) töötamise korral, et rahuldada erinevate osade töötlemisvajadusi, ning võib täielikult asendada traditsioonilise veerelaagri spindli struktuuri ja selle spindli. struktuur on lihtne, kompaktne ja suudab saavutada tõelise astmeteta kiiruse reguleerimise. Selle spindli kiirust juhitakse välise analoogsignaaliga, et juhtida väljundsagedust erinevates töötlemisprotsessides (nt töötlemine, viimistlemine jne) vajavad erinevat kiirust, sel ajal saab arvjuhtimissüsteem väljastada erinevat analoogpinge signaale. inverter erineva kiiruse saavutamiseks ning käivitus- ja seiskamissignaali juhib ka arvjuhtimissüsteem, mis parandab automatiseerituse taset ja pikendab tööriista kasutusiga.

Postitusaeg: 17. nov 2023