
Ülevaade
Ühe tala veoauto on tööstusvaldkonnas tavaliselt kasutatav seade, mida kasutatakse kaupade liikumiseks kolmemõõtmelises ruumis. Nende hulgas lõpetab horisontaaltasandi kahe suuna töö suur auto, töö vertikaalne suund vastutab elektrilise tõstemehhanismi tõstmise eest, elektritõstuk on kahekäiguline kooniline mootor, Elektriline juhtimisrežiim on põhimõtteliselt vahelduvvoolu kontaktori otsekäivitus, löögivool on liiga suur, mootorit ja komponente on lihtne kahjustada, mehaaniliste seadmete eluiga on lühenenud, hooldussumma on suhteliselt suur. Ja kiiruse reguleerimise karakteristikud on kehvad, silumine pole piisavalt sujuv.
Elektrilise tõstuki töö omadused
Kraanal on suur käivitusmoment, tavaliselt üle 150% nimipöördemomendist, kui võtta arvesse ülekoormust ja muid tegureid, tuleks käivituskiirenduse käigus tagada vähemalt 200% nimipöördemomendist.
Kui tõstemehhanism on tühi, on mootor regeneratiivse energiatootmise olekus ja sellele tuleb rakendada energiatarbimise pidurdamist või taastuvenergia tagasisidet võrku.
Tõstemehhanismi koormus muutub järsult, kui tõsteraskus lahkub või puudutab maapinda ning inverter peaks suutma löögikoormust sujuvalt juhtida.
KD600 inverteri omadused
- Magnetväljale orienteeritud voolu avatud ahela vektorjuhtimine, mootori muutujad on täielikult lahti ühendatud, madala sagedusega pöördemomendi, kiire reageerimiskiiruse ja muude omadustega;
- KD600 võtab kasutusele PG-vaba avatud ahela vektorjuhtimisrežiimi ja vektoriseeritud V/F-režiimi, et suurendada võimsustaset ühe astme võrra;
- Sagedusvahemik: 0,5-600Hz astme seadistus, astmeteta pidev reguleerimine;
- Tööpinge vahemik: 380V±20%, siini pinge hetkega nii madal kui 360VDC tõrgeteta töö;
- Ülekoormusvõimsus: 150% nimivool, jätke 1 minut; 200% nimivool, lubatud 1 sekund;
- Pöördemomendi omadused: käivitusmoment, rohkem kui 2 korda suurem kui nimimoment; Madalsageduslik pöördemoment, 1 Hz suurem kui 1,6 korda nimipöördemoment; Pidurdusmoment on suurem kui nimimoment.
Lihtne juhtmestiku skeem
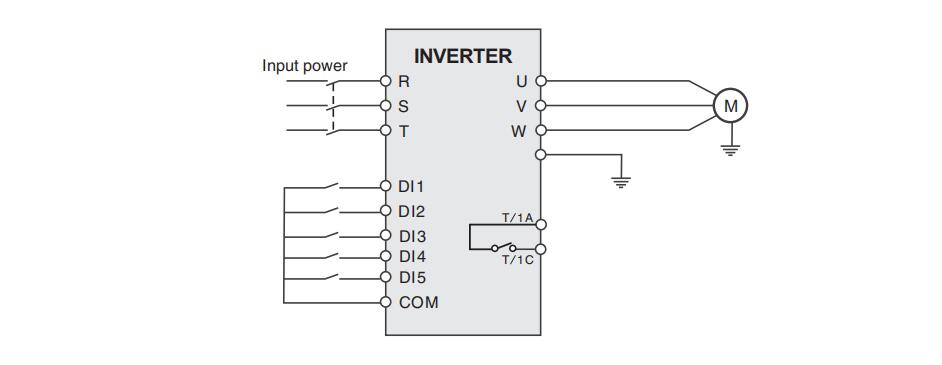
Võrdlusparameetrid Seadistused ja kirjeldused on järgmised
| Funktsiooni kood | Määra väärtus | Juhend | Märkus |
| P0-03 | 1 | Vektorrežiim | |
| P0-04 | 1 | terminali juhtimine | |
| P0-06 | 4 | mitme kiirusega sagedus | |
| P0-23 | 3 | kiirenduse aeg | |
| P0-25 | 5 | aeglustusaeg | |
| P6-00 | 32 | Piduri juhtimine | |
| B5-00 | 1 | Piduri lubamine | |
| B5-01 | 2.5 | Vabastage pidurisagedus | |
| B5-04 | 1.5 | Pidurdussagedus | |
| P4-01 | mootori võimsus | ||
| P4-02 | mootori pinge | ||
| P4-04 | mootori nimivool | ||
| P4-05 | mootori nimisagedus | ||
| P4-06 | mootori kiirus | ||
| P5-00 | 1 | Edasi | |
| P5-01 | 2 | vastupidine | |
| P5-02 | 12 | mitme kiirusega 1 | madal kiirus |
| P5-03 | 13 | mitme kiirusega 2 | keskmine kiirus |
| P5-04 | 14 | mitme kiirusega 3 | suur kiirus |
| PC-01 | madala kiirusega sagedus | ||
| PC-02 | keskmise kiirusega sagedus | ||
| PC-04 | suure kiirusega sagedus |
Operatsiooni mõju analüüs
KD-seeria inverteri juhtimissüsteemi teisendus, transformatsiooniefekt on ideaalne, peamiselt:
- Pehme käivitus ja pehme seiskamine realiseeritakse käivitamisel, vähendades mõju elektrivõrgule.
- Sagedusmuunduri kasutamine algse vahetuskontaktori ja kiirustakistuse kõrvaldamiseks, st hoolduskulude kokkuhoiuks, aga ka seisakuaja vähendamiseks, parandades seeläbi väljundit.
- Peakonks, mis töötab sagedusel 5Hz ~ 30Hz, võib avaldada väga selget mõju.
- Parandage väliprotsessi, säästke toorainet;
Lõppsõna
Sagedusmuunduri kasutamine eesmise ja tagumise käigu juhtimiseks, samuti vasak- ja parempoolsete käigumehhanismide seeriat võib saavutada ülesagedusliku töö, parandades oluliselt töö efektiivsust, tagades samal ajal ohutuse ja vähendades ka vahelduvvoolu sagedase vahetamisega seotud hoolduskoormust. kontaktorid sõiduseadmetes.
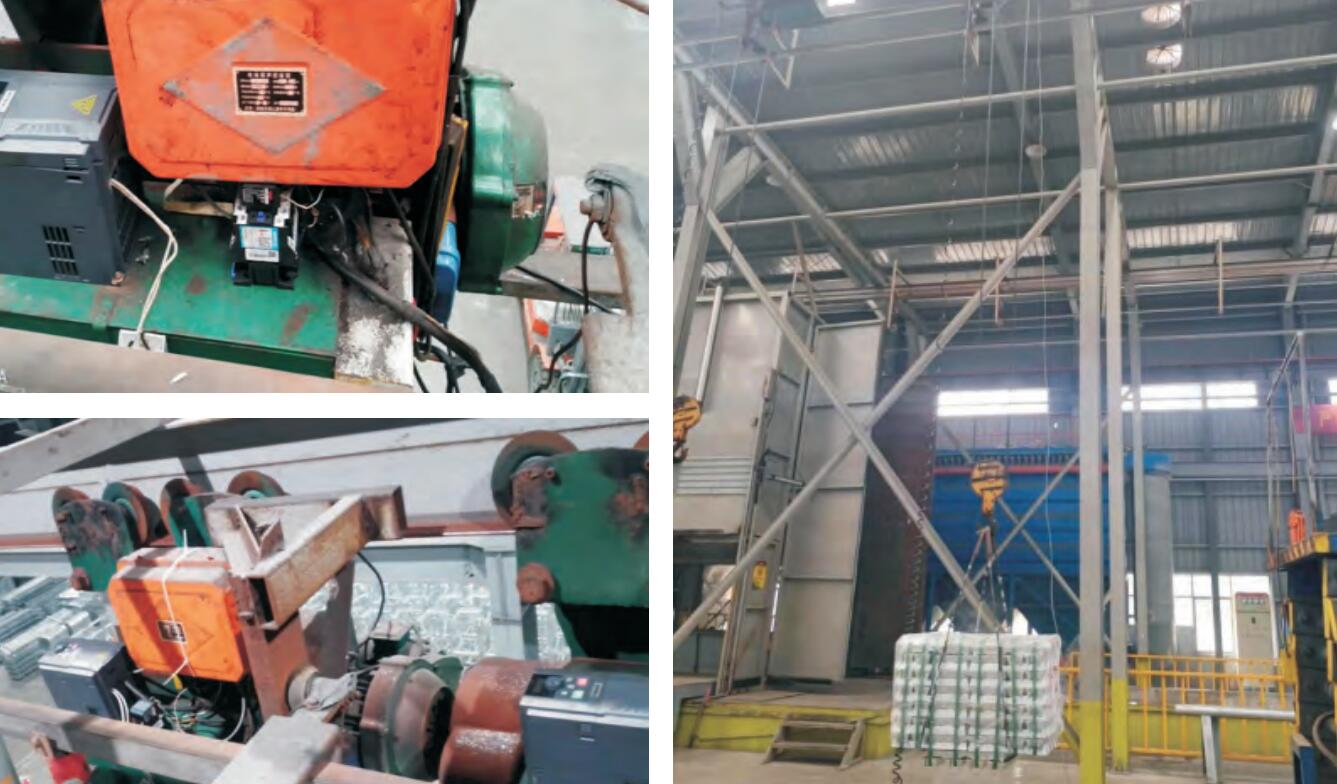
Rakenduskoht
Postitusaeg: 17. nov 2023